ANavS® A-ROX (RTK)
All-in-ONE: ab ca. März 2025 lieferbar
Innovativste Ground-Truth-Lösung durch Tight-Coupling von GNSS-INS
0.02° | 0.01 m Positionsgenauigkeit |
0.05° | 0.15° |

ANavS A-ROX
Nicht nur Systeme - sondern maßgeschneiderte Lösungen - die den Unterschied machen - für jede Anwendung.
Das ANavS® A-ROX-Modul liefert präzise Positions-, Bewegungs- und Lageinformationen, indem es GNSS-, IMU- und Odometerdaten eng koppelt und PPP- oder RTK-Korrekturen auf die GNSS-Code- und Phasenmessungen anwendet.
Die ANavS® A-ROX-Modul unterstützt den Galileo High Accuracy Service (HAS) (sowohl über SIS als auch IDD) und OSNMA für die Genauigkeit der Navigationsdaten. Das A-ROX-System ist mit einer ROS2-Softwarearchitektur ausgestattet, die den Zugriff auf alle Sensor-Rohdaten und Lösungsausgaben mit ROS2-Themen ermöglicht. Diese Software-Architektur macht es sehr leistungsfähig für eine einfache Integration in andere Toolchains und Subsysteme.
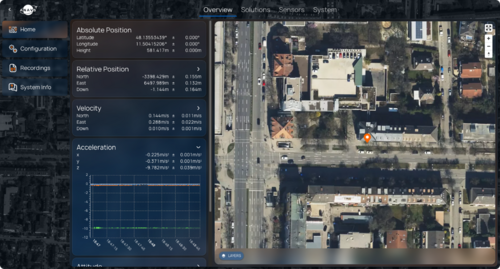
Eine leistungsfähige Web-App vervollständigt das A-ROX System. Die neue Benutzeroberfläche macht das System noch einfacher und noch anwenderfreundlicher. Sie wird direkt im System gehostet und macht eine Softwareinstallation auf dem PC/Notebook überflüssig. Sie ermöglicht zudem auch die Integration in Flottenmanagementsysteme mit der Möglichkeit, alle Geräte zentral zu steuern. Ein leistungsfähiges Nachbereitungstool ist in der Web-App integriert.
Das A-ROX-System basiert auf einer neu entwickelten modularen Hardwareplattform, die eine verbesserte Verarbeitungsleistung und erweiterte M.2- Schnittstellen bietet. Es lässt sich flexibel als Einzel- (AROX RTK-1), Doppel- (A-ROX RTK-2)- oder Dreifach-Antennensystem (A-ROX RTK-3) konfigurieren.
Das ANavS® A-ROX-Modul umfasst:
- Integrierte Multifrequenz- und Multi-GNSS-Empfänger (Basisvariante ist ein Ein- oder Zweiantennensystem, es ist aber auch eine Erweiterung bis zu einem Dreiantennensystem möglich)
- Hochwertige MEMS-IMU (eine Erweiterung mit einer FOG-IMU ist möglich)
- Bis zu 4x CAN-FD-Kanäle zum Auslesen von Fahrzeugdaten und der Datenbereitstellung (NMEA, ROS-2, ANavS Binary Format, ACOM)
- Integrierter Quad-Core ARM-Prozessor (1,5 GHz, 8 GB RAM, 16 GByte Speicher), auf dem die eng gekoppelte ANavS GNSS/ INS/ Odometrie RTK/PPP Sensor-Fusion Engine läuft.
- Interner 16GByte Flash-Speicher (optionaler SSD-Speicher mit bis zu 1TByte)
- 5G Modem (2x2MIMO) mit SIM-Karte
- PTP-Master
- NTRIP-Klient
Technologie
Die eng gekoppelten ANavS-Sensor-Fusion integriert GNSS-Rohmessdaten (Multikonstallation, Multifrequenz), RTK- und PPP-Korrekturdaten (HAS und Terrestrisch), Inertialsensordaten (FOG-Grade MEMS IMU) und Odometriedaten für eine hochpräzise Positions- und Lagebestimmung, selbst unter schwierigsten GNSS-Umgebungen.
Eine leistungsstarke Vorwärts-Rückwärts-Nachverarbeitung aller aufgezeichneten Sensor-Rohdaten ist ebenfalls vorhanden, um die Genauigkeit von Position und Lage zu bestimmen.
Das A-ROX-System liefert alle Konfigurations- und Rohdaten in einzelnen ROS2- Dateien aus.
Anwendungsbereiche
Das A-ROX-System wurde speziell als Ground Truth Sensor für dynamische Automotive-, Eisenbahn-, Schiffs- und maritime Anwendungen entwickelt.
Anwendungsbereiche:
- ADAS
- autonome Fahrzeugtests
- Dauertests
- Flottentests
- Vermessung & Kartierung von Land, Wasser und Luft
- Georeferenzierung von Kameras, Lidars und Radarsensoren
- Aufzeichnung von Parametern bei Fahrzeugtests (CAN)
- Maschinenautomatisierung etc.
Schnittstellen
Das A-ROX-System ist mit einem integrierten 5G-Modul ausgestattet, was den Zugriff auf Korrekturdaten und den Fernsupport äußerst benutzerfreundlich gestaltet.
A-ROX verfügt über unterschiedlichSchnittstellen, die für den Anschluss zusätzlicher Sensoren, z.B. Radumdrehungsimpulse, einer Kamera oder eines Lidars oder für die Ausgabe der Positionsinformationen genutzt werden können:
- 1x Gigabit Ethernet
- 1x Wi-Fi
- 2x CAN-FD (es ist möglich, die Unterstützung auf bis zu 4 CAN-FD-Schnittstellen zu erweitern)
- 1x 5G 2×2 MIMO
- 2x USB 3.1
- 4x GPIO
Trigger Events, wie Radumdrehungsimpulse, können über die GPIOs in das Sensorfusions-Framework übertragen werden.
Es stehen mehrere Ausgabeformate mit einer maximalen Ausgaberate von 200 Hz zur Verfügung: ROS2, NMEA, ACOM (NCOM-kompatibel).
Spezifikationen
| GNSS Konstellationen | Galileo, GPS, Glonass, Beidou, SBAS (EGNOS, WAAS, GAGAN) |
| Positionsgenauigkeit* | 0.006 m RTK; 0.2 m PPP |
| Roll/Pitch* | 0.01° |
| Geschwindigkeitsgenauigkeit | 0.03m/s RMS |
| Heading | 0.05° |
| Schräglagegenauigkeit* | 0.15° |
| Ausgabeformat | Maximum Ausgaberate von 200 Hz verfügbar: ROS2, NMEA, ACOM (NCOM kompatibel) |
| Betriebstemperatur | -20°………..65° |
| IP Rating | IP65 |
| Stromverbrauxh | Durchschnittlich 15W |
| Abmessungen | 140 x 200 x 60 mm |
| Gewicht | 1,7 kg |
| Interner Speicher | 16 GB internal, erweiterbar mit NVME SSD bis zu 2 TB |
| Schnittstellen | Gigabit Ethernet, Wi-Fi, 5G 2×2 MIMO cellular network, bis zu 4x CAN-FD Kanäle, USB 3.1, 4 GPIO, PPS und sync in |
| Duale Antenne | Ja |
Datenblatt
Alle Produktvorteile ANavS® A-ROX auf einem Blick
Unser Produktversprechen
Unterschiedlichste Anwendungsmöglichkeiten durch die modulare, M.2 SMART Card-basierte Konfigurationsstruktur, In- und Output über GPIO zur besseren Sensorfunktion, PTP etc.
Es sind bis zu 3 vermessungstaugliche GNSS Empfänger - zur präzisen Positionsbestimmung - vorhanden. Die Rohdaten aller Empfänger sind verfügbar (mit bis zu 100 Hz), ebenso ein PPS Signal.
In der Praxis nachgewiesene Einhaltung der Spezifikationen - "überzeugen Sie sich durch eine kostenlose Evaluierung".
Integriertes Modem ermöglicht die Nutzung aller weltweit verfügbaren Korrekturdatendienste wie RTK- (RTCM3, OSR) oder PPP-Korrekturdaten (RTCM3, SSR), ohne zusätzliche Hardware. Die entsprechende Dienste können dazugebucht werden.
Modernes Web-Basiertes User-Interface mit Fernzugriff, App, einfache Konfiguration und automatisiertem Versionsmanagement
Zollfreie Einfuhr, keine Dual-Use und Exportbeschränkungen (ITAR-free).
Die Erstauslieferung erfolgt mit einer DAkkS-Kalibrierung (SPEKTRA), die Kalibrierung in Deutschland führt zu minimalen Ausfallzeiten.
Internes WLAN- und LTE-Modem, dadurch sind weniger Kabel und Geräte im Testfahrzeug nötig (mehr Platz), weniger Fehlerquellen, "Ein Gerät - Alle Funktionen".
Durch intensive Forschungs- und Entwicklungsprojekte (R&D) besitzt ANavS einen Wissens- und Innovationsvorsprung, um fortschrittliche Lösungen und Technologien schneller und effektiver zu entwickeln, die bisher bei vergleichbaren Systemen noch nicht implementiert sind (z.B. HAS, PPP, OSNMA, ggf. weitere -> Andreas);


Web-App

Postprocessing Performance

Aktuelle Forschungs- und Entwicklungsprojekte von ANavS
1. Aktuelle Forschungs- und Entwicklungsprojekte mit ANavS als Konsortialführer
Projektziel für das Forschungsprojekt:
Um die fehlende Datengrundlage für die Validierung von Sensoren für das automatisierte Fahren zu erzeugen, soll ein hochpräzises Referenzsystem aus Radar, Kamera, Lidar, GPS und Inertialsensorik entwickelt, aufgebaut und in einen Versuchsträger integriert werden. Diese Referenzsensorik ist der heutigen Seriensensorik mehrere Jahre voraus und stellt die Grundlage zur Erfassung von genauen Sensordaten dar.
Projekt Periode: 07/2023 – 06/2026
Projekt Partner:
- ANavS GmbH
- Institut für Hochfrequenztechnik und Elektronik (IHE) am Karlsruher Institut für Technologie (KIT)
- Hochschule Offenburg (HSO)
- Freudenberg FST GmbH mit Sitz Weinheim
- Akkodis Germany GmbH, Sindelfingen
- FZI Forschungszentrum Informatik, Karlsruhe
- IAVF Antriebstechnik GmbH, Karlsruhe
- IPG Automotive GmbH, Karlsruhe
- GTÜ Gesellschaft für Technische Überwachung mbH, Stuttgart
- HighQSoft GmbH, Idstein
- RA Consulting GmbH, Bruchsal
- Dr. Ing. h.c. F. Porsche AG, Stuttgart
Projekt Leader bei ANavS: Dr. Patrick Henkel
Projekt Koordination: ANavS GmbH
Gefördert durch:
- Bundesministerium für Wirtschaft und Klimaschutz (BMWi)
- Europäische Union
Projektziel:
Entwickung neuer Lösungen für die Mobilität von Personen und Transportgütern, insbesondere für die genaue Lokalisierung von Mobilitätssystemen (Indoor und Outdoor), generalisierte Umgebungserkennung und risikobewusste Manöverplanung auf dedizierter Hardware zur energieeffizienten Lösung komplexer Teilprobleme auf Fahrzeugen, wobei der Schwerpunkt auf dem Werksverkehr liegt.
Projekt Periode: 07/2023 – 06/2026
Projekt Partner:
- ANavS GmbH
- FZI Forschungszentrum Informatik, Karlsruhe
- KIT, Karlsruher Institut für Technologie
- Schaeffler Technologies AG & Co KG
Projekt Leader bei ANavS: Dr. Patrick Henkel
Projekt Koordination: ANavS GmbH
Gefördert durch: Bundesministerium für Wirtschaft und Klimaschutz
Projektziel:
Entwicklung eines autonomen, heterogenen Schwarmes von Robotern zur Erkundung der Valles Mariners des Planeten Mars. Fahrende, gehende und fliegende Systeme sollen ihre Vorteile nutzen, um gemeinsam ein großes Gebiet mit unterschiedlichen Umwelteigenschaften zu erforschen.
Projekt Periode: 07/2022 – 06/2025
Projekt Partner:
- ANavS GmbH
- Julius-Maximilians-Universität Würzburg
- Deutsches Forschungszentrum für künstliche Intelligenz GmbH
Projekt Leader bei ANavS: Dr. Patrick Henkel
Projekt Koordination: ANavS GmbH
Gefördert durch:
- Bundesministerium für Wirtschaft und Klimaschutz
- Deutsches Zentrum für Luft- und Raumfahrt e.V.
2. Aktuelle Forschungs- und Entwicklungsprojekte mit ANavS als Projektpartner
Projektziel:
Die Untersuchung und Entwicklung innovativer GNSS-PPP-RTK-Positionierungsalgorithmen, die für eine hochgenaue Echtzeit-Positionierung mit GNSS-Korrekturen der State Space Representation (SSR) aus dem Galileo High Accuracy Service (HAS) und anderen Korrekturdatendiensten geeignet sind und mit anderen SSR-Korrekturdatendiensten wie z.B. der CNES IGS Echtzeit-Korrektur validiert werden sollen.
Projekt Periode: 01/2024 – 12/2024
Projekt Partner: ANavS GmbH
Projekt Leader bei ANavS: Philipp Bohlig
Gefördert durch: Europäische Weltraumorganistion ESA
Projektziel:
Entwicklung eines HW- und SW-Prototyps für "Fahrhilfen für Busse".
Die Anwendungen des Prototyps sollen darauf abzielen, den Fahrer beim sicheren Fahren zu unterstützen, indem ihm sicherheitsrelevante Informationen geliefert werden, die nicht nur auf der Fahrzeugposition und -dynamik, sondern auch auf der Umgebung basieren. Konkret geht es darum, hochpräzise und zuverlässige Informationen bereitzustellen, die den Fahrer z. B. vor dem Überfahren einer roten Ampel, vor Geschwindigkeitsüberschreitungen, dem Vermeiden von Zusammenstößen/Unfällen oder dem Fahren in der falschen Richtung warnen.
Projekt Periode: 12/2023 – 11/2025
Projekt Partner:
- ANavS GmbH
- EUSPA (European Union Agency for the Space Program)
Projekt Leader bei ANavS: Jorge Moran Garcia
Projekt Koordination: EUSPA (European Union Agency for the Space Program)
Gefördert durch: Europäische Kommission
Projektziel:
Stärkung der Wettbewerbsfähigkeit der PNT-Industrie.
Nach dem deutschen Gesetz zum automatisierten Fahren, ist für hochautomatisierte Fahrzeuge im öffentlichen Verkehr und in der Logistik ein technischer Überwachungsdienst erforderlich, um die Sicherheit zu gewährleisten. Im Rahmen des ESA-Projekts Nav 4 Future Mobility NAVISP arbeiten DiMOS und wir als Unterauftragnehmer gemeinsam mit der Ostbayerischen Technischen Hochschule Regensburg an der Entwicklung eines "Demonstrators für einen technischen Überwachungsdienst".
Projekt Periode: 09/2023 – 02/2025
Projekt Partner:
- ANavS GmbH
- DiMOS Operations GmbH
- Ostbayerische Technische Hochschule Regensburg
Projekt Leader bei ANavS: Andreas Sperl
Projektkoordination: DiMOS Operations GmbH
Gefördert durch: Europäische Weltraumorganistion ESA
Weitere Informationen zu dem Projekt ESA Nav 4 Future Mobility NAVISP Project
Projektziel:
Die Entwicklung eines mobilen Ortungssystem (mPOM) für Gleisbaumaschinen und Integration in die bestehende IT-Systemlandschaft der SBB.
Mit dem mobilen Ortungssystems, inklusive der Erkennung von Arbeitseinsätzen für Gleisbaumaschinen, soll die Arbeitsleistung automatisch erkannt, geortet und für die weitere Bearbeitung zur Verfügung gestellt werden.
Kunde: Schweizer Bundesbahn (SBB)
Projekt Periode: 10/2023 – 12/2024
Projekt Partner:
- ANavS GmbH
- sersa – Rhomberg Sersa Rail Group
Projekt Leader bei ANavS: Andreas Sperl
Projektkoordination: SBB Infrastruktur
Projektziel:
Während im Vorgängerprojekt ABSOLUT das Gesamtsystem einer hochautomatisierten, bedarfsgesteuerten ÖPNV-Landschaft entwickelt, aufgebaut und durch Versuche mit Probanden evaluiert wurde, zielt ABSOLUT II nun auf die Lösung eines zentralen Problems ab: Der bisherige Sicherheitsfahrer im Fahrzeug soll durch einen stationären technischen Betreuer in einer Leitstelle gemäß dem Gesetz zum autonomen Fahren ersetzt werden und so einen Fernzugriff auf das Fahrzeug ermöglichen.
Projekt Periode: 10/2023 – 09/2026
Projekt Partner:
- ANavS GmbH
- BitCtrl Systems GmbH, FSD
- FSD Zentrale Stelle, Dresden
- IKEM – Institut für Klimaschutz, Energie und Mobilität
- INIT GmbH
- Stadt Leipzig
- Technischen Universität Dresden
- glts cotech GmbH
- Leipziger Verkehrsbetriebe (LVB) GmbH
- Sedenius Engineering GmbH
Projekt Leader bei ANavS: Dr. Patrick Henkel
Projekt Koordination: Leipziger Verkehrsbetriebe (LVB) GmbH
Gefördert durch: Bundesministerium für Wirtschaft und Klimaschutz (BMWi)
ANavS News
Publikationen von ANavS
Ihr Ansprechpartner
